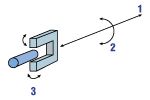
| ■3-axis Manipulators for Ultra-High Vacuum |
| ●Axis configuration |
| 1. Linear movement in Z-axis direction |
| 2. Z-axis center rotation |
| 3. Chucking |
 |
 |
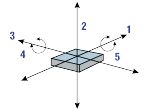
| ■5-axis Manipulators for Ultra-High Vacuum |
| ●Axis configuration |
| 1. Linear movement in X-axis direction |
| 2.Linear movement in Y-axis direction |
| 3. Linear movement in Z-axis direction |
| 4. Z-axis center rotation |
| 5. Flapping |
|
 |
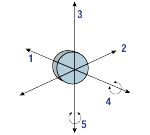
| ■5-axis Manipulators with LN2 Cooling |
| ●Axis configuration |
| 1.Linear movement in X-axis direction |
| 2. Linear movement in Y-axis direction |
| 3. Linear movement in Z-axis direction |
| 4.X-axis center rotation |
| 5. Z-axis center rotation |
|
 |
| ■Z-axis Stage with 100 kg Loading Capacity |
| ●Axis configuration |
| 1.Linear movement in Z-axis direction |

|
 |
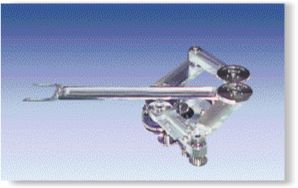
| ■Transfer
Robot-1 for Ultra-High Vacuum |
| ●Axis configuration |
| 1. Polar coordinates(rotation,Linear
movement in X-axis direction) |
| 2. Linear movement in Z-axis direction |

|
 |
| ■Transfer
Robot-2 for Ultra-High Vacuum |
| ●Axis configuration |
| 1. Polar coordinates(rotation,Linear
movement in X-axis direction) |
|
 |